Overview
This project focused on enabling a Franka Emika Panda robot arm to autonomously catch a thrown ball in real time. Using stereo vision and learned object detection, the system tracks a ball in flight, predicts its trajectory, and commands the robot to intercept the ball at a predefined catching plane.
The project was completed as a team-based final project for ME 450 / ME 495, with an emphasis on real-time perception, motion planning, and system integration in ROS 2.
Team Members
- Anunth Ramaswami
- Kasina Jyothi Swaroop
- Kyle Thompson
- Zixin Ye
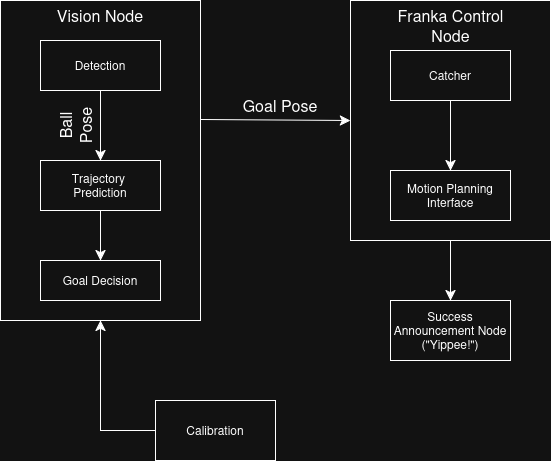
System Architecture
The system consists of three tightly coupled pipelines:
- Perception – Ball detection and 3D localization
- Prediction – Trajectory estimation and interception point computation
- Control – Cartesian motion planning and execution using MoveIt 2
Perception Pipeline
- An Intel RealSense camera provides synchronized RGB-D data at 60 FPS.
- Multiple rosbags were recorded by throwing the ball in different trajectories and conditions.
- The collected data was labeled and used to train a YOLO object detection model using Roboflow.
- The trained model weights are loaded by the vision node at runtime.
- The YOLO object detector identifies the ball in the RGB stream.
- Depth data is fused with image detections to compute the ball’s 3D position.
- Ball poses are published as ROS 2 transforms for downstream processing.
To support accurate hand–eye calibration, an ArUco marker-based calibration pipeline was implemented using easy_handeye2.
RVIZ Display:
Trajectory Prediction
Once the ball is detected across multiple frames:
- A trajectory prediction node estimates the ball’s flight path with a least-squared algoritm.
- The intersection point between the predicted trajectory and a predefined catching plane is computed.
- The predicted intercept pose is published in real time for motion planning.
The prediction system must balance accuracy vs latency, as the ball is typically in flight for only ~1 second.
Robot Motion & Control
- Motion planning is handled using MoveIt 2 with Cartesian path planning.
- The robot transitions between:
- A ready pose
- A hoop pickup pose
- A dynamically computed catching pose
- ROS 2 services control system state, including:
- Picking up the catching hoop
- Arming the robot for a throw
- Resetting predictions between throws
Performance & Limitations
Timing Constraints
- Ball flight time: ~1 second
- Robot motion time (max scaling): ~0.56 seconds
- Prediction requires sufficient samples before committing to a motion plan
This narrow timing window limits the range of successful catches.
Camera Constraints
- The RealSense depth range restricted the allowable throwing distance.
- Reduced flight time negatively impacted trajectory prediction accuracy.
Improvements Explored
Plan Caching
Motion plans were precomputed and cached to reduce planning latency.
Testing showed planning time was already minimal (~14 ms), with execution speed remaining the primary bottleneck.
ZED 2i Camera
A ZED 2i camera was evaluated for improved depth range and frame rate.
Although the hardware showed promise, a custom ROS 2 wrapper resulted in dropped depth frames, leading to unreliable detections during prediction.
Demo
A live demonstration showing real-time detection, trajectory prediction, and interception:
My Contributions
- Designed and implemented the trajectory prediction pipeline
- Integrated YOLO-based perception with ROS 2 transform broadcasting
- Assisted with MoveIt 2 Cartesian motion planning
- Debugged RealSense depth synchronization and latency issues
- Contributed to full system integration and live testing
Technologies Used
- ROS 2
- MoveIt 2
- Intel RealSense
- YOLO (Ultralytics)
- OpenCV
- Python
- Franka Emika Panda Robot